Learning an Epitrochoid with an Autoencoder#
![]()
[1]:
import jax
import jax.random as jr
import matplotlib.pyplot as plt
import numpy as np
import quaxed.numpy as jnp
import unxt as u
import phasecurvefit as pcf
[2]:
key = jr.key(201030)
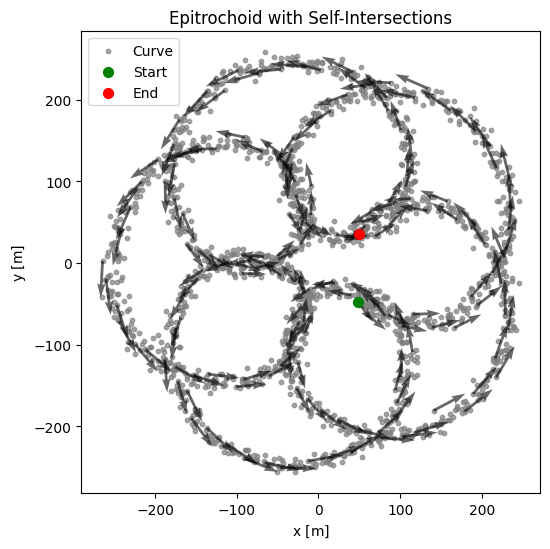
Data: Self-Intersecting Epitrochoid Curve#
We build a single stream that self-intersects using an epitrochoid curve that traces one continuous loop from 5° to 355°, leaving a 10° gap so the curve doesn’t close back on itself. The epitrochoid’s internal structure (5 loops within one outer rotation) creates multiple self-intersections along the path.
At the crossings, a pure distance-based walk (lam=0) can jump to the other branch. The momentum term (lam>0) biases toward continuing along the current direction, dramatically reducing branch-jumps.
We parameterize the stream by a scalar t, and evaluate ordering quality by counting non-monotonic steps in t along the walked path (backward jumps).
[3]:
usys = u.unitsystems.si
[4]:
def make_self_intersecting_stream(
key,
*,
n: int,
noise_sigma=0.5,
scale=120.0,
R: float = 5.0,
r: float = 1.0,
d: float = 4.5,
):
"""Return (pos, vel, t) for an OPEN curve with self-intersections."""
# Epitrochoid parameters: ratio=5 means 5 internal loops per outer rotation
# Single outer rotation: 5° to 355° with 10° gap
t_start = 5.0 * jnp.pi / 180.0
t_end = 355.0 * jnp.pi / 180.0
t = jnp.linspace(t_start, t_end, n)
ratio = (R + r) / r # = 5 internal rotations per outer rotation
x0 = scale * ((R + r) * jnp.cos(t) - d * jnp.cos(ratio * t)) / 5.0
y0 = scale * ((R + r) * jnp.sin(t) - d * jnp.sin(ratio * t)) / 5.0
# Derivatives for velocity
dx0 = scale * (-(R + r) * jnp.sin(t) + d * ratio * jnp.sin(ratio * t)) / 5.0
dy0 = scale * ((R + r) * jnp.cos(t) - d * ratio * jnp.cos(ratio * t)) / 5.0
# Optional small positional noise
kx, ky = jr.split(key)
x = x0 + noise_sigma * jr.normal(kx, (n,))
y = y0 + noise_sigma * jr.normal(ky, (n,))
# Pack into unitful quantities
pos = {"x": u.Q(x, usys["length"]), "y": u.Q(y, usys["length"])}
vel = {"x": u.Q(dx0, usys["speed"]), "y": u.Q(dy0, usys["speed"])}
return t, pos, vel
[5]:
key, subkey = jr.split(key)
t, pos, vel = make_self_intersecting_stream(
subkey,
n=2048,
noise_sigma=6,
)
[6]:
fig, ax = plt.subplots(figsize=(6, 6))
ax.scatter(pos["x"], pos["y"], label="Curve", color="gray", alpha=0.7, s=10)
# Add velocity arrows every 10th point
every = 12
ax.quiver(
np.array(pos["x"][::every]),
np.array(pos["y"][::every]),
np.array(vel["x"][::every]),
np.array(vel["y"][::every]),
scale=10_000,
width=0.006,
alpha=0.6,
color="black",
)
ax.scatter(pos["x"][:1], pos["y"][:1], label="Start", color="green", s=50)
ax.scatter(pos["x"][-1:], pos["y"][-1:], label="End", color="red", s=50)
ax.legend()
ax.set(
aspect="equal",
title="Epitrochoid with Self-Intersections",
xlabel=f"x [{ax.get_xlabel()}]",
ylabel=f"y [{ax.get_ylabel()}]",
)
plt.show();
[7]:
# Shuffle the data
key, subkey = jr.split(key)
order = jr.permutation(subkey, jnp.arange(len(t)))
qs = jax.tree.map(lambda x: x[order], pos)
ps = jax.tree.map(lambda x: x[order], vel)
[8]:
# Determine the starting index as the point closest to the starting point
start_idx = int(np.argsort(order)[0])
# Walk configuration
config = pcf.WalkConfig(
strategy=pcf.strats.KDTree(k=60),
metric=pcf.metrics.FullPhaseSpaceDistanceMetric(),
)
metric_scale = u.Q(4, "s")
max_dist = u.Q(40, "m")
# Perform walk
walkresult = pcf.order(
qs,
ps,
pcf.orderers.LocalFlowOrderer(
start_idx=start_idx,
metric_scale=metric_scale,
max_dist=max_dist,
config=config,
direction="forward",
),
metadata=pcf.StateMetadata(usys=usys),
)
walkresult.gamma_range
[8]:
(0.0, 1.0)
[9]:
fig, ax = plt.subplots(1, 1, figsize=(10, 8))
im = ax.scatter(qs["x"], qs["y"], s=1, c="k")
ax.scatter(
np.array(qs["x"][start_idx])[None],
np.array(qs["y"][start_idx])[None],
c="green",
s=100,
label="Start Point",
)
ax.quiver(
np.array(qs["x"][start_idx])[None],
np.array(qs["y"][start_idx])[None],
np.array(ps["x"][start_idx])[None],
np.array(ps["y"][start_idx])[None],
color="green",
)
ordering = walkresult.ordering
walk_qs = {k: v[ordering] for k, v in walkresult.positions.items()}
timeline = np.linspace(0, 1, len(ordering))
im = ax.scatter(walk_qs["x"], walk_qs["y"], s=50, c=timeline, cmap="RdYlBu")
ax.plot(walk_qs["x"], walk_qs["y"], c="k", lw=1, ls="--")
plt.colorbar(im, ax=ax, label="data order")
ax.set(
aspect="equal",
xlabel=f"x [{ax.get_xlabel()}]",
ylabel=f"y [{ax.get_ylabel()}]",
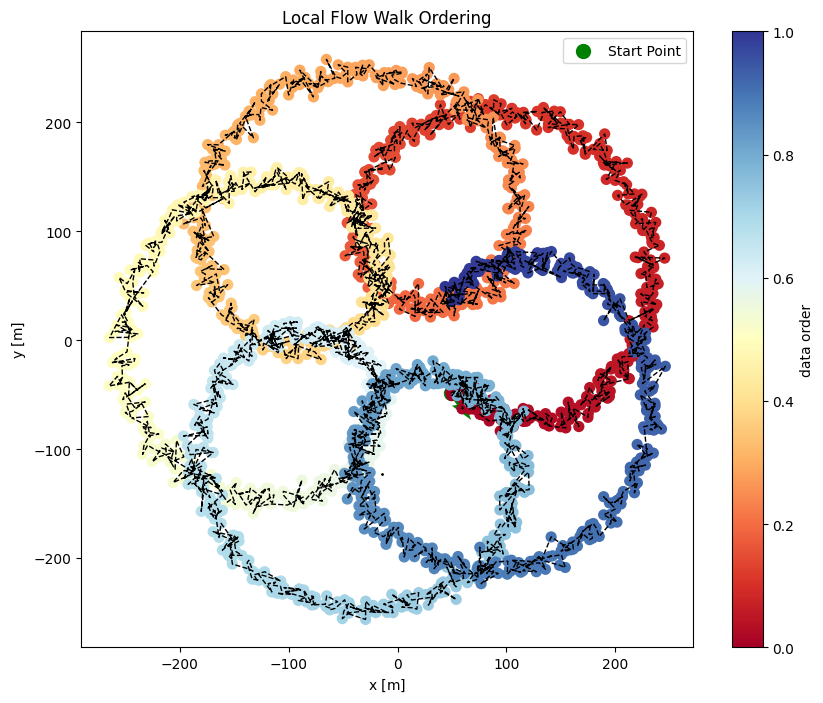
title="Local Flow Walk Ordering",
)
plt.legend()
plt.show();
[10]:
# Train autoencoder
key, model_key, train_key = jr.split(key, 3)
normalizer = pcf.nn.StandardScalerNormalizer(qs, ps)
ae_model = pcf.nn.PathAutoencoder.make(
normalizer, track_depth=4, gamma_range=walkresult.gamma_range, key=model_key
)
config = pcf.nn.TrainingConfig(n_epochs_decoder=200, n_epochs_both=200)
result, opt_state, losses = pcf.nn.train_autoencoder(
ae_model, walkresult, key=train_key, config=config
)
[11]:
# Plot training losses
fig, ax = plt.subplots(figsize=(10, 5))
ax.plot(np.asarray(losses), linewidth=2)
ax.set_xlabel("Epoch", fontsize=12)
ax.set_ylabel("Loss", fontsize=12)
ax.set_title("Training Loss Over Epochs", fontsize=14)
ax.set_yscale("log")
ax.grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
print(f"Final loss: {losses[-1]:.6f}")
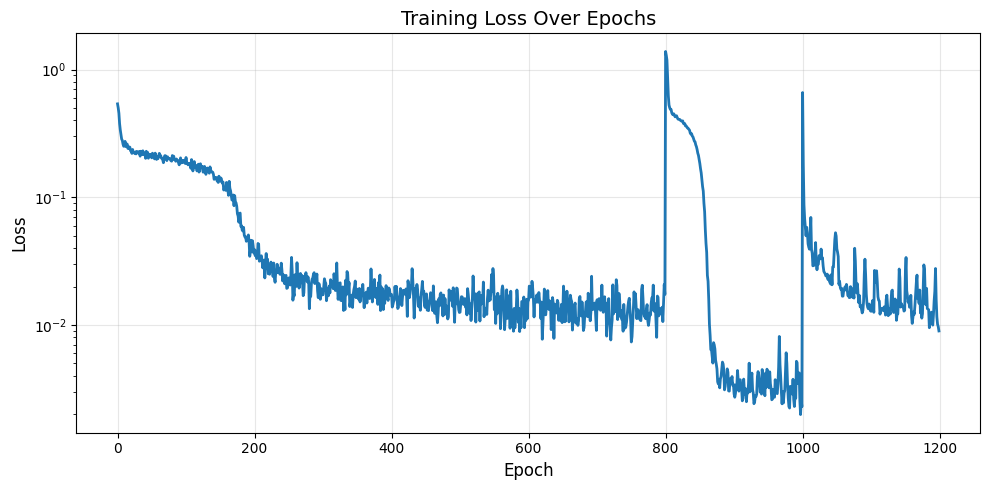
Final loss: 0.012031
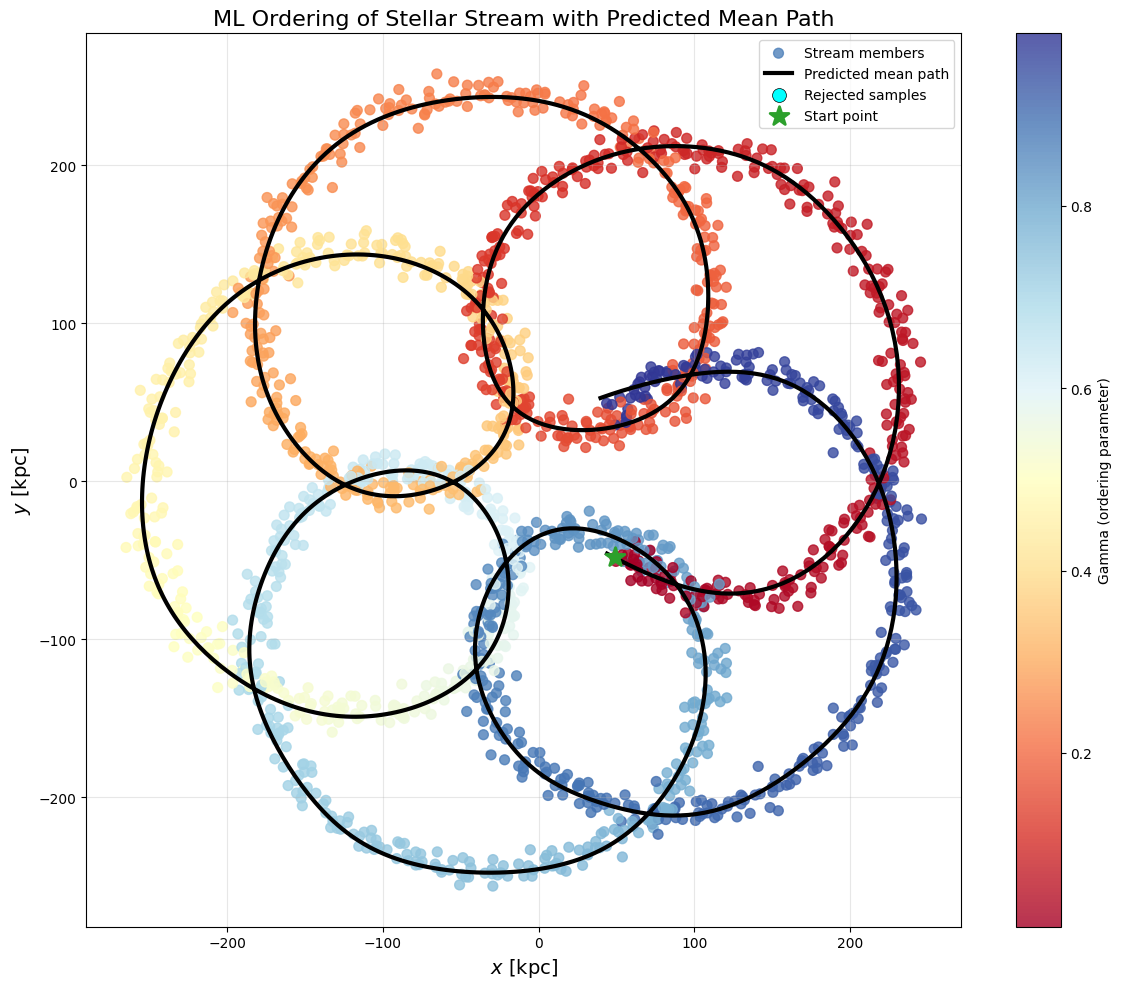
[12]:
# Visualize the ML-filled path in 2D with mean path prediction
fig, ax = plt.subplots(figsize=(12, 10))
# Use the trained model from the result
all_gamma, all_probs = result.model.encode(walkresult.positions, walkresult.velocities)
rejected_membership = all_probs < 0.9
qs_pred = result(jnp.linspace(*result.gamma_range, 1_000))
# Plot all points with gradient coloring
im = ax.scatter(
np.asarray(qs["x"]),
np.asarray(qs["y"]),
s=50,
c=np.asarray(all_gamma),
cmap="RdYlBu",
alpha=0.8,
label="Stream members",
)
# Plot predicted mean path
ax.plot(
np.asarray(qs_pred["x"]),
np.asarray(qs_pred["y"]),
c="k",
lw=3,
label="Predicted mean path",
)
# Mark rejected samples in cyan
ax.scatter(
np.asarray(qs["x"][rejected_membership]),
np.asarray(qs["y"][rejected_membership]),
s=100,
c="cyan",
alpha=1.0,
marker="o",
edgecolors="black",
linewidths=0.5,
label="Rejected samples",
)
# Mark start point
ax.scatter(
np.asarray(qs["x"][start_idx]),
np.asarray(qs["y"][start_idx]),
s=200,
c="tab:green",
marker="*",
label="Start point",
linewidths=2,
zorder=5,
)
ax.set_xlabel(r"$x$ [kpc]", fontsize=14)
ax.set_ylabel(r"$y$ [kpc]", fontsize=14)
ax.set_title("ML Ordering of Stellar Stream with Predicted Mean Path", fontsize=16)
fig.colorbar(im, ax=ax, label="Gamma (ordering parameter)")
ax.legend(loc="upper right", fontsize=10)
ax.grid(True, alpha=0.3)
plt.tight_layout()
plt.show();